In most magnet systems, current is tightly regulated.
But in high-end experiments, the real question is not:
“Is the current stable?”
It is:
“Is the magnetic field B stable at the sample position?”
Because magnetic field stability depends on more than current:
- Coil temperature drift
- Core hysteresis (for electromagnets)
- External environmental interference
- Power supply voltage margin
- Mechanical positioning
Closed-loop field control addresses this by regulating B directly, not just current.
1. Current Control vs Field Control: The Fundamental Difference
Traditional architecture:
Current Setpoint → Current Driver → Coil → Magnetic Field (B)
If the driver maintains ±10 ppm current stability, it assumes B is equally stable.
But this assumes:
- Coil resistance does not drift
- No magnetic core hysteresis
- No external field disturbance
- No mechanical shift
In reality, B ≠ perfectly proportional to I under dynamic conditions.
For background on magnetic field generation:
- Wikipedia – Magnetic field
https://en.wikipedia.org/wiki/Magnetic_field
High-precision experiments often require field-level stabilization.
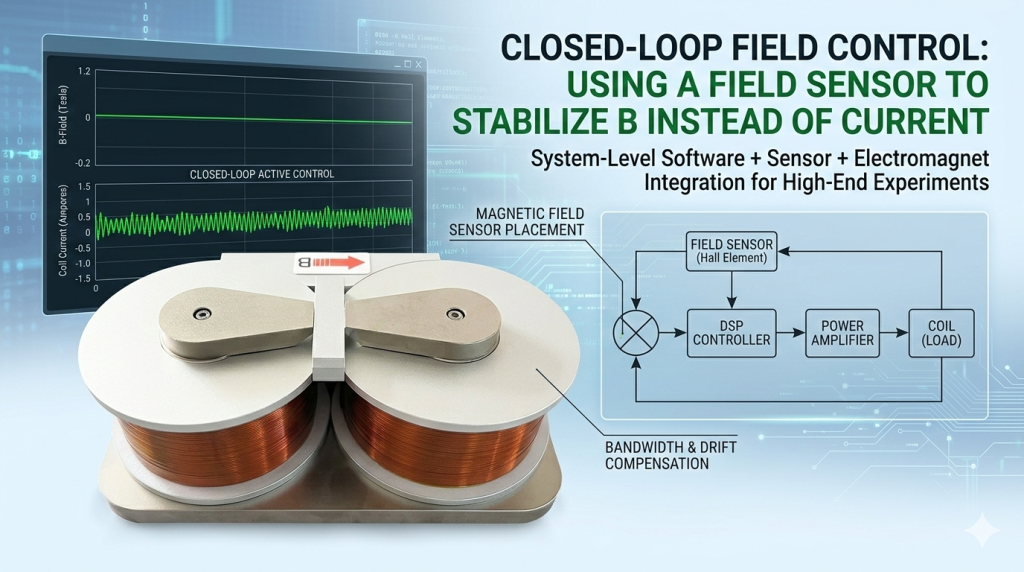
2. What Is Closed-Loop Field Control?
Closed-loop field control adds a field sensor into the feedback loop:
Field Setpoint → Controller → Driver → Coil → B
↑ ↓
Field Sensor ←–––––––––––––––––––––––
Instead of controlling current alone, the system:
- Measures actual magnetic field
- Compares it to target
- Adjusts current dynamically
This architecture compensates for:
- Thermal drift
- Core nonlinearity
- Environmental fluctuations
3. Sensor Placement: Where You Measure Matters
Field stabilization only works if you measure the right location.
Common sensor placement strategies:
1. Near-Coil Placement
- Faster response
- Less accurate at sample
2. Sample-Plane Placement
- True experimental field measurement
- Slightly slower feedback
3. Differential Sensing
- Compensates for environmental noise
Hall sensors, fluxgate sensors, or NMR probes may be used depending on precision requirements.
Sensor selection impacts:
- Bandwidth
- Noise floor
- Temperature sensitivity
4. Bandwidth vs Noise: The Control Trade-Off
Higher feedback bandwidth:
- Faster correction
- Better dynamic stability
But:
- Amplifies sensor noise
- May introduce oscillation
Lower bandwidth:
- Smoother control
- Reduced noise injection
But:
- Slower drift correction
Closed-loop field systems require careful tuning of:
- PID parameters
- Sensor filtering
- Driver response speed
Field stabilization bandwidth must exceed dominant drift frequency but remain below sensor noise dominance.
5. Drift Suppression in Long Experiments
In long-duration magnetic measurements:
- Coil resistance increases
- Iron-core magnetization shifts
- Ambient magnetic fields vary
With current-only control, B drifts with system parameters.
With field-closed loop:
- Sensor detects B deviation
- Controller adjusts current
- Drift is actively compensated
Field stabilization becomes essential in:
- Quantum transport experiments
- Spintronic measurements
- Low-noise Hall effect systems
- Automated magnetic cycling
Drift suppression mechanisms in feedback-controlled electromagnetic systems are widely discussed in IEEE control literature:
- IEEE Xplore – Feedback control in electromagnetic systems
https://ieeexplore.ieee.org/
6. When Closed-Loop Field Control Is Necessary
You should consider field-level feedback if:
- Magnetic stability requirement < 100 ppm
- Long-duration measurement cycles
- Iron-core electromagnets with hysteresis
- Environmental magnetic interference
- Automated or unattended experiments
If your system only needs coarse field stability, current control may suffice.
But precision labs increasingly require field-verified control.
7. System-Level Integration: Coil + Sensor + Software + Driver
Closed-loop field control is not a single component upgrade.
It requires integration of:
- Magnet system (Helmholtz coil or electromagnet)
- High-stability excitation driver
- Field sensor with appropriate noise floor
- Control software with tunable PID parameters
Cryomagtech supports integrated magnet systems designed for field-level stabilization, including:
- Helmholtz coil systems
- Electromagnet systems
- Compatible excitation drivers
- Sensor integration support
- System-level control architecture
👉 Product Link Placeholder – Integrated Magnet Systems with Closed-Loop Field Control
True field stability is achieved through system integration, not just a low-noise current source.
8. Key Takeaways
- Current stability does not guarantee field stability
- Closed-loop field control regulates B directly
- Sensor placement determines stabilization accuracy
- Bandwidth must balance correction speed and noise
- Field feedback suppresses thermal and environmental drift
If your experiment depends on stable B,
then current control alone is not enough.
Closed-loop field control turns a current driver into a field-stabilized system.